网站推广合同模板关键词排名监控
工业机器人负载设置 (KUKA)
一、库卡工业机器人负载设置存在的问题目的其实只有一个,合适的负载,在合适驱动力下,机械手无论在静态还是动态都能够承受足够的惯性力矩,以保证电气控制系统对机械手操控。
和其他机械手品牌一样,库卡也需要设置合适的负载参数,唯一不同的是库卡这个选项功能Load Data Determination需要购买,其他原厂制造商一般是比较开放的。
我们也可以通过PRO-E或者CAD进行人工计算该数值。在软件理论计算中难免存在一定的误差(余量负载误差),所以如果在设计过程中没有考虑过多动态负载余量,会产生很多不利因素,比如冲击负载过大,不同程度对机械手刚性会影响很大,尤其是负载比较高的情况下,导致精度严重不良(六个轴的负载影响累积精度误差)以及发生的轨迹偏移等现象,甚至严重的机械手断裂!

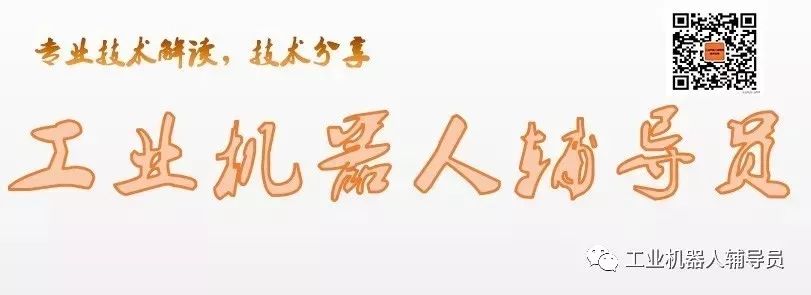
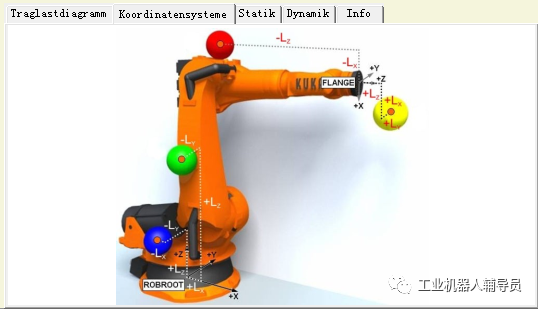
带自动负载计算功能的,可以自动计算此功能。获得负载参数后保存到对应的负载工具(编号)中,一般包括工具重量,重心以及惯性。
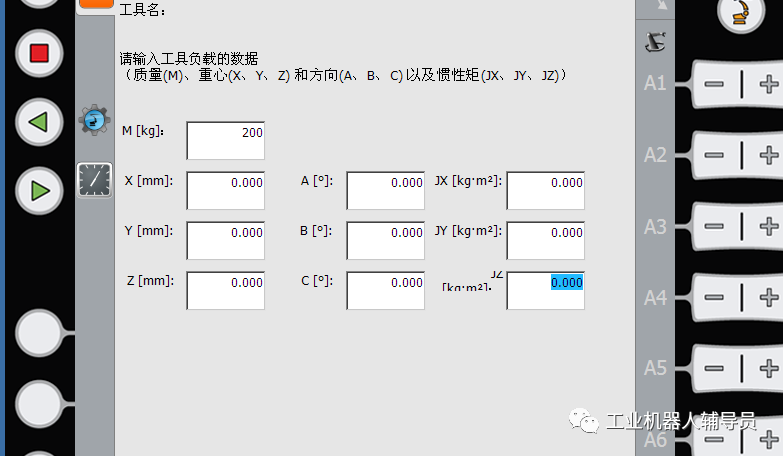
没有带负载选项功能的可以通过负载测试软件进行校正,保留余量后手动写入此工具负载参数。人工计算的处于什么状态的负载,可以进行评估并进行不同程度的改善。比如KR210 这款负载M在200KG,工具负载的重心影响到A5轴超载现象,通过此可以进行及时改善工具设计。
(软件需要的朋友可后台留言)
二、关于Load Data DeterminationKUKA机器人选项Load Data Determination能够计算有效负载数据,最多能够设置16个有效负载。
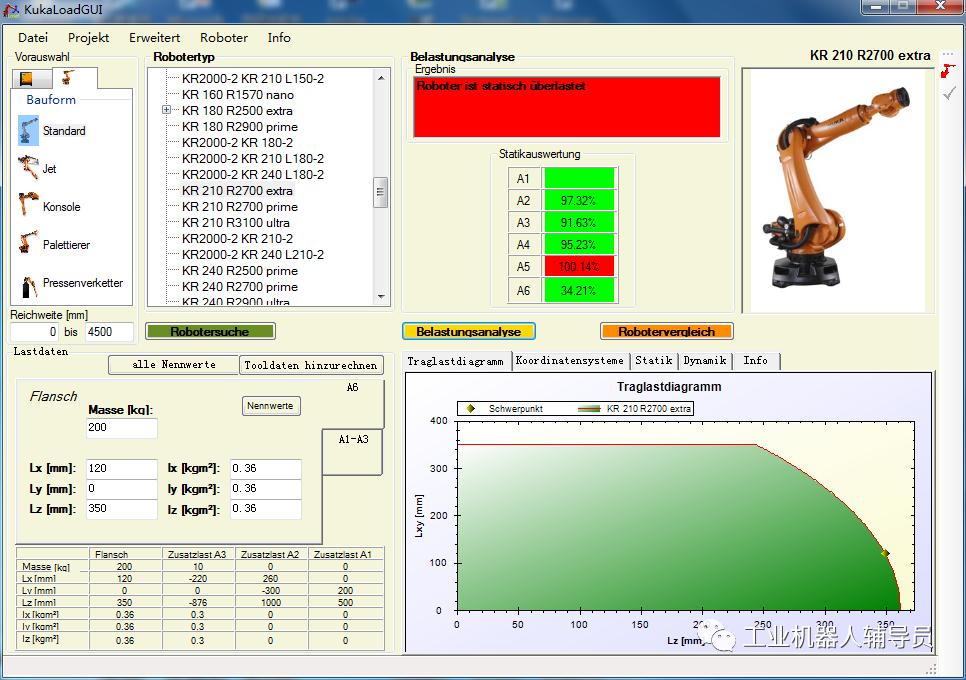
通过负载测试自动计算获得工具重量,重心以及惯性。测试完毕后可以看到实际数值并保存对应工具负载编号即可。
三、Load Data Determination设置大体路径:
1、改语言为英文,在示教器菜单
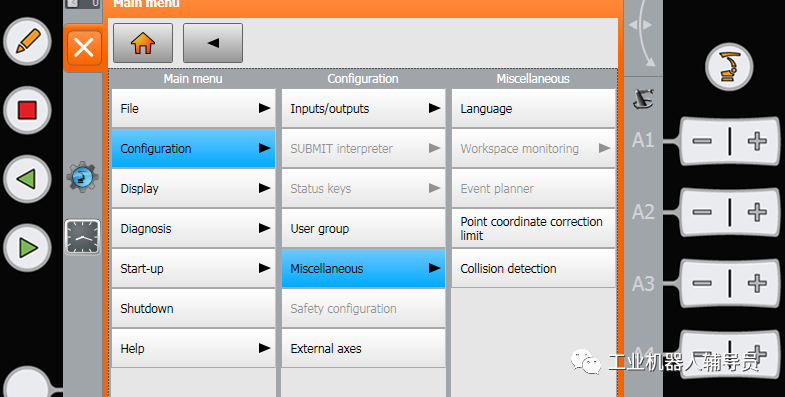
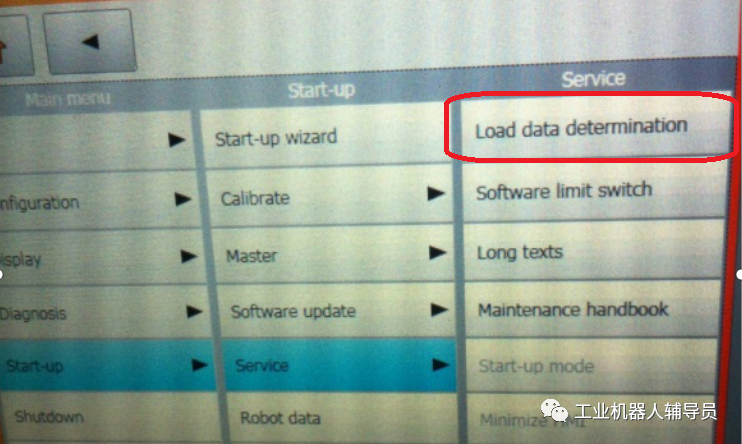
2、点击投入Start up选择服务Service,选择自动负载计算Load Data Determination。
3、机械手姿态将第2、3 轴打到±90 度,第4、5、6轴成0度左右进行保存然后进行下一步。
4.选择机械手铭牌对应机型型号
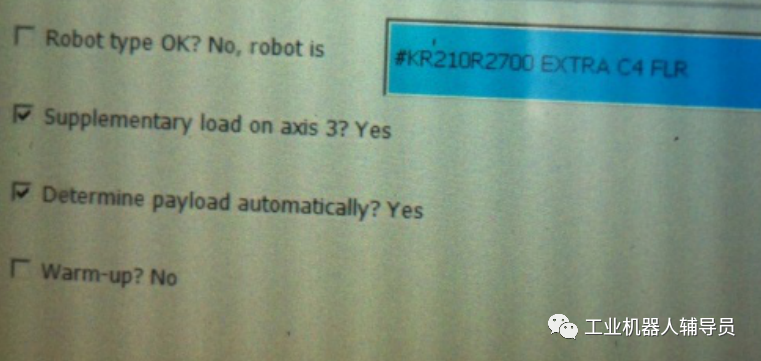
5.保存后将机器人打到内部自动模式,运行Start进入负载测试程序根据提示选择YES。
6、完成后保存对应工具编号中。
更多信息请查看历史记录
工业机器人负载设置 (FANUC)
库卡KRC4 (BECKHOFF EL6731模块)通信配置说明
KUKA机器人无法上使能(故障案例)
关于ABB机器人拐角路径警告50024
FANUC机器人系统常用变量总结
KUKA电机与编码器引脚关系图表
YASKAWA机器人设备维护要点分析
ABB喷涂机器人吹扫系统的主要作用是什么
关于KUKA机器人程序运行BCO
YAMAHA机器人RCX240 I/O接线表(备用)
视觉检测(FANUC)与OFFSET补偿方式分类
关于YAMAHA机器人原点复位的问题
关于ABB机器人动作监控(手动)灵敏度修改的问题
ABB机器人检修时间如何消除(现场备用)
ABB机器人电池更换时回零程序Reference
ABB机器人视觉IP地址设置方法参考
YAMAHA机器人故障视频案例(系统备份方法)
YAMAHA机器人E17故障排除案例参考
FANUC伺服焊枪压力标定参考
FANUC伺服焊枪零点标定参考
工业机器人伺服焊枪设置(FANUC详细完整)
工业机器人故障管理与预防性工作
ABB机器人码垛包位置调整参考
关于安川机器人平衡气缸故障现象
关于安川机器人平衡气缸维护要点参考
FANUC机器人故障 SRVO-062解除方法
FANUC机器人电机编码器分析(图解)
FANUC机器人负载手动设置方法参考
安川机器人并行IO分配 (查询)
工业机器人电气设计元件选取规则参考
安川电机与伺服放大器电路接线图
ABB机器人减速机漏油检漏测试
ABB机器人紧凑型控制柜内部结构(图)
KUKA机器人CCU板信号指示灯(从颜色判断状态)
工业机器人伺服电机故障分析
感谢关注,有问题请留言!转载请注明出处!