资源网站优化排名软件/网页设计制作软件
永磁同步电机(Permanent Magnet Synchronous Motor)与普通的电励磁同步电机相比,区别主要是励磁方式的不同。电励磁转子需要为励磁线圈提供外部电源,效率较低,结构也更加复杂。PMSM因为省去了励磁线圈,使电机结构更加简单,效率更高,深受新能源汽车的青睐,主流市场占比超过70%以上。PMSM的定子与普通同步电机电子一样,输入的三相定子电流为正弦波,由于永磁同步电机的电枢绕组在定子上,采用高性能永磁材料以后,转子惯量小,功率密度高,动态性能好,在新能源汽车上更加受到广泛的应用。
结构原理
按照永磁体安装形式分类,可分为凸极式(SPM)和嵌入式(IPM)。如下图所示:
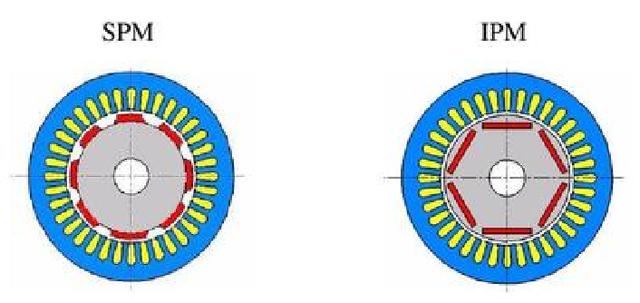
凸极式转子是将永磁体安装在转子轴的表面,产生的气隙磁密接近于正弦波,所以电机有良好的动态性能。嵌入式转子则是将永磁铁嵌入到转子轴的内部,能够产生磁阻转矩,在控制中,可以灵活的利用磁阻转矩提高电机的动态性能。
对于同步电机,当极对数确定时,电机转速与与定子电流的频率成正比。在定子绕组上施加正弦交流电时,定子绕组就会在空间上产生旋转的磁场,与转子的恒定磁场相互作用就会产生电磁转矩,旋转的磁场"吸引"永磁转子磁场,推动转子旋转。同其他交流电机相比,除了使用永磁体代替励磁绕组外,在其他结构上没有太大的区别,可以采用矢量控制。
坐标变换
在三相静止120度坐标系下,电机扭矩方程为:

很明显,在这个坐标系下扭矩不可控。空间矢量变换技术通过坐标变换实现定子电流中励磁分量和转矩分量的解耦,从而使系统分析和控制得到大大简化。
采用矢量控制系统的三相永磁同步电机在理论上可以完全等效为他励直流电动机,改变上面等式所示的转矩方程的非线性特性,从而可获得良好的电机转矩输出特性。矢量控制的基本思想就是采用坐标变换的方式,将三相静止平面坐标系下的电机电流变换到随转子磁场等速旋转的两相旋转平面直角坐标系下的电机电流,坐标变换前后,电机电流所产生的磁动势保持不变。分别控制两相旋转直角坐标下的 d 轴定子电流和 q 轴定子电流,可实现对三相永磁同步电机的电磁转矩和旋转磁场的独立控制。
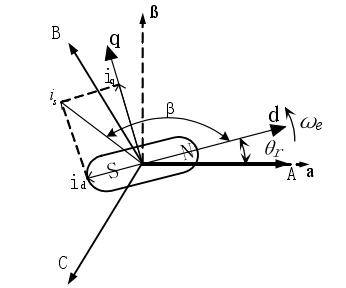
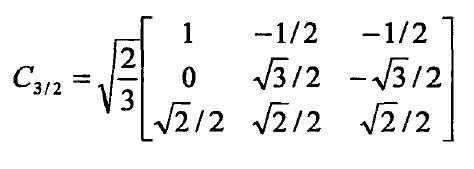
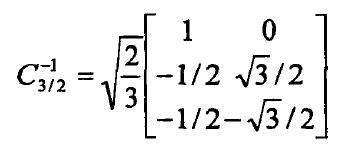
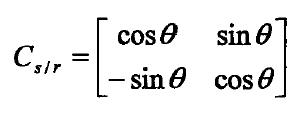
如上图所示,将三相静止120度坐标系(A-B-C)下的正旋电流转换为两相静止直角坐标系下(α-β)的正旋电流称为Clarke变换,其变换矩阵及逆变换矩阵如下:
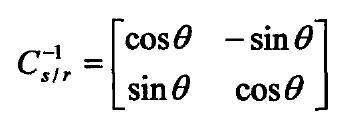
将两相静止直角坐标系下(α-β)的正旋电流转换为两相旋转直角坐标下(d-q)的恒定电流称为Park变换,其变换矩阵及逆变换矩阵如下:
数学模型
有了上面的坐标变换,电机扭矩就可以变成可控的,具体推导过程这里不详细展开。
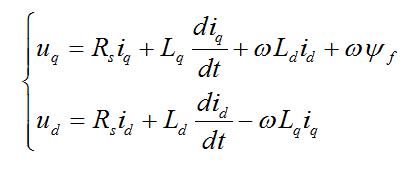
在dq坐标系下,为简化模型推导,作如下假设:
1.忽略铁芯饱和;
2.不计涡流和磁滞损耗;
3.转子上没有阻尼绕组,永磁体没有阻尼作用;
4.三相绕组完全对称,气隙磁场为正弦分布,定子电流及转子磁场分布对称。
电压方程为:
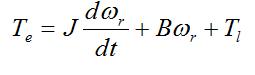
电磁转矩方程为:

运动方程为:
弱磁
永磁同步电机受逆变器直流侧最大电压和输出电流能力的限制,电机的定子电压和电流存在极限值,影响电机在恒转矩工作时的最大转速和输出转矩的范围。所谓弱磁控制,就是通过削弱气隙磁链来降低感应电动势,使它始终小于输入电压,并且达到扩大电机转速范围的效果。
永磁同步电机的电流极限值为Imax,电流极限方程为:
电压极限值为Umax,电机高速运行时,忽略电阻上的压降,可以推导出电压极限方程为:
依据上式可在dq轴定子电流坐标系下绘制电流极限圆和电压极限椭圆,如图所示。
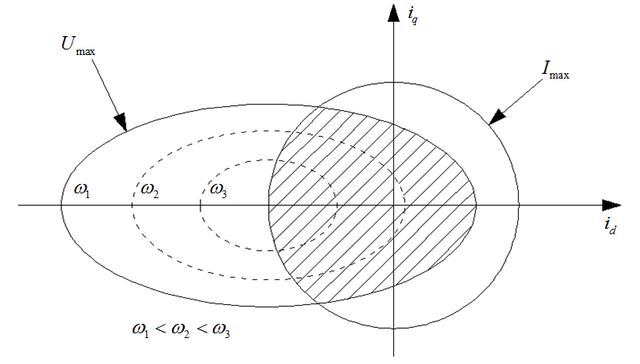
由图可知,在进行电机控制时,电机定子电流矢量必须处于电流极限圆与电压极限椭圆的交集中(即图中阴影部分)。同时,随着转子电角速度的增大,电压极限椭圆不断减小,电机的工作范围逐渐减小。减小iq或者负向增大id,可以使电机的工作点继续保持在阴影范围内。
弱磁的本质就是,当电机端电压达到逆变器直流侧电压允许输出最大值后,减弱电动机磁场使电机转速继续升高,从而满足恒功率控制和宽调速范围运行。
SVPWM
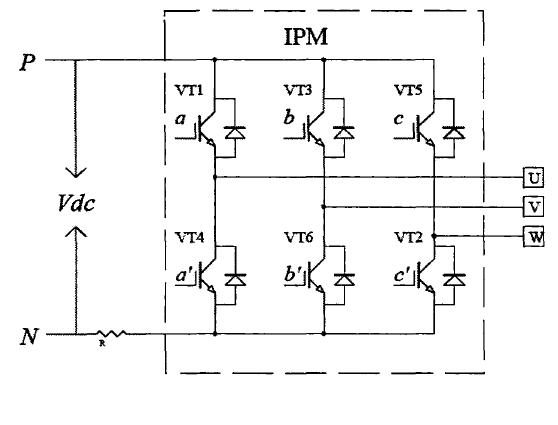
SVPWM是空间矢量脉宽调制简称,是以逆变器产生圆形磁场为目标,按照一定的驱动顺序及驱动时间驱动逆变桥中功率开关。按照这种控制功率管开关的策略施加到逆变器上,逆变器可以输出正弦电流,驱动同步电机工作。如图所示的是一种典型的三相电压源逆变器的拓扑结构。按照控制策略,通过调整开关的顺序以及开关的时间,可以输出圆形运行轨迹电压空间矢量。
以上,简要介绍了永磁同步电机的基本内容,具体的公式推导比较复杂,文中基本都省略了(建议看专业书籍或者论文了解推导过程)。下一篇我们尝试搭建一个永磁同步电机仿真控制模型,看看控制效果。