免费网站一级a做爰在免费线看/在线网站分析工具
上次聊了聊CUDA程序的性能优化思路,发现写起来真是停不下来……因为换了工作,后续就拖了挺久。现代人真的挺忙的,长文章意义有限,我懒得写,大家也懒得看。想了想,先把一些系统的东西讲讲清楚,然后讲些琐碎的感想,每次就讲一两个要点,理论少点,随性些,不拘于格式,多举点具体例子,也许效果更好些。不过这一次,好吧,长文预警……
顺便还是强调一下,这些知识还是有些门槛的,对刚入门的初学者可能不太友好。但只要你有些基础知识,看完后如果有不清楚的地方,可以自己找找资料深入研究,也许可以增加一些可能并不怎么有用的知识。我也会尽量多给出一些参考材料。有些地方我可能也会有一些想当然的地方,也希望大家能批评指正,共同学习。
今天开始,准备花几篇文章聊聊CUDA的总体流程设计。这是第一部分,主要讲CUDA程序的等级结构。
我这里说的总体流程设计,指的是怎么把一个具体任务转化为Kernel,Kernel每个thread和block之间应该怎么组合。如果一个kernel做不成,那多个Kernel怎么分工。这里的流程也包括Kernel之间,Kernel和其他API(比如cudaMemcpy),或者是和其他CPU任务之间,怎么配合等等。想对CUDA程序做一个很好的规划,就要先深入了解CUDA程序的各级组成单元。只有了解每层单元具体是怎么工作的,清楚它们相互同步、通信的机制,才能更好的让它们协作配合。所以这篇先讲CUDA程序的等级结构。
Kernel 上层的等级结构
首先简单阐述一下CUDA kernel以上的等级结构。每个CUDA程序都必须是一个CPU进程,其中可能包括一个到多个CPU线程,CPU线程间的共享关系与普通多线程程序是一样的。每个CUDA程序都包含(或隐含)一个到多个CUDA context(driver api里的CUcontext)。CUDA context可以看成是类似CPU进程的GPU进程,大部分的runtime api,包括memcpy,启动kernel,bind texture等等,都会运行在这个context上。每个context都有自己的资源空间,相互隔离,互不影响,所以有一个出错也不会影响到其他context。每个CUDA程序至少会有一个context,不显式初始化的话程序会自动分配一个,这也是runtime api大部分时候的用法。也可以申请多个,但每线程当前只能用一个。CUDA会维护一个context的栈,可以通过类似push/pop的方式切换当前context。每个context会包含一些模块(CUmodule,有的是以cubin文件形式保存),类似dll。模块内会有一些kernel function(CUfunction),也会有一些模块内资源的描述(比如constant memory,texture reference等),load模块时这些资源就会得到分配。值得一提的是,kernel function不仅可以访问本模块内的资源,其实整个context的内容都是可见的。更具体的描述可以参考CUDA C++ Programming Guide中driver api的部分。具体的driver api的内容也可以看CUDA Driver API.
这里有几个微妙的地方:
- 一是多线程的CPU程序能共享context吗?答案是可以。其实本身同一进程的资源就是相互可见的,所以多线程可以共享context。每个context执行时有一个或多个stream,同一个stream内的api是序列化的,前一个返回后才能运行后一个。所以其实多线程并不适合同时操作同一个stream,但不同stream其实是可以同时操作的。一些更大型的应用也可以让每个线程维护自己的context,这样相互干扰更少,万一一个出错也不会导致整个进程崩溃。当然,CPU同时执行api是一回事,到了GPU设备端肯定还是有一个queue来维护顺序执行关系(比如申请资源这种肯定要排队,不可能完全并行)。
- 二是多GPU的情况怎么办?其实每个卡(或者更精确的说是每个GPU芯片,对应driver api里的
CUdevice)都有相互独立的context。资源也是相互独立的。CUDA里有managed memory,可以让它看起来是每个device都可访问(也包括host),但其实只是把数据搬运自动化后隐藏起来而已,本质上每个卡的资源还是分开的。CUDA程序暂时还不能做到自动把多块卡当成一块来用,一个kernel也不能自动分在两个GPU上运行,有NVlink也不行。所以当前情况下多GPU还是需要用户自己来手动分割任务。
Kernel的等级结构
一个CUDA Kernel大概可以分为这么几层(从底层到顶层):thread,warp,block,grid。下面就分别讲讲这几层的特征和运行模式。
1. Thread
Thread是CUDA程序的底层任务单元,与CPU的thread具有比较高的相似性(其实独立性上更像进程一些)。每个Thread都有一些私有资源:
- General Perpose Register: 通用寄存器,简称GPR,有时也直接叫Register(寄存器)。GPR通常按个算,一个是32bit,在CUDA的SASS汇编里一般写成
R0,R123这种格式。每个线程使用的具体GPR数目是编译器根据需要进行配置的,每个kernel的所有线程都保有相同数目的GPR。最近几代架构单线程最大可用数目是255,因为指令集里GPR编码有8bit(2^8=256),而且R255=RZ被用来做恒零的输入,或者当输出时表示抛弃输出。
Tips:GPU的GPR实际来自于SRAM组成的一大块Register File,每个线程可以分得其中的一部分。一旦线程创建后,物理上的单个GPR和线程里的R0、R1等就建立了一一对应关系,不再改变,直到退出。这与X86 CPU的寄存器运行机制上有些差别。因为X86的ISA中支持的通用寄存器比较少,为了减少指令间的依赖,有时会用寄存器重命名(Register Renaming)的方式用多个逻辑上的寄存器去对应ISA的同一个寄存器。所以X86 CPU在物理上的寄存器与ISA中的寄存器不是完全一一对应的,物理寄存器数目是更多的。GPU并不存在寄存器重命名这种方式。
- Predicate:1bit的bool谓词,每线程有7个, SASS里用
P0~P6表示。Predicate通常是一些bool运算(比如大于,不等于)的输出。CUDA的每个汇编指令都可以用Predicate来控制是否真正运行。形式如@!P0 BRA 0xc40。这里前面的@!P0表示P0为假时这行才运行(更准确的说法是才起作用),前面带!表示取反。Predicate与直接branch跳转的方式是可以避免warp divergence,而且与branch指令相比开销更小。因为一般branch的延迟比较高,还涉及到指令Cache和内部pipeline连续性的问题,所以开销大一些。不过,即使Predicate为否,本身这个指令的运行开销也不会有变化,只是不写回结果而已。(PS:如果是load指令,是什么情况呢?相当于cache hit吗?我还没有仔细研究过……)
当然,Predicate不仅可以用作指令的谓词,也可以做操作数。比如整数加法的carry输入输出,SEL、FMNMX、IMNMX等这种选择指令的操作数等等。
CUDA的SASS指令集里Predicate是4bit编码,3bit用来索引(2^3=8),1bit表示是否取反。前面说了,每线程可用的Predicate只有7个(P0~P6),还有一个哪去了?其实P7也有的,就相当于PT(true),表示一直是真值。这个predicate在控制指令运行中是不用显示表示的。如果前面没写,就是@PT。另外PT有时候也会作为一些指令的操作数。
- Local Memory:Local Memory是每个线程私有的一段内存空间。它在物理上与Global memory并没有区别,只是访问方式和可见性不一样。Local memory主要有两个使用场景,一是一些线程内的私有数组如果索引在编译期不能确定,就需要放在Local memory里。另一个是每个线程的GPR是有限的,但有些程序的逻辑比较复杂,需要的GPR超过了一定限制,导致有些GPR被暂存到内存里(称为register spill)。这虽然会影响性能,但有时为了减少GPR的使用,也是不得已的手段。
注意:local memory并不是线程自己动态申请的资源,而是整个kernel启动时为每个线程分配好的固定大小的资源。这个size是编译器决定的,运行过程中并不能改变。用户可以用nvcc的--resource-usage选项查看具体每个kernel的资源使用情况。
- 其他资源:前面说的GPR、Predicate和Local Memory是线程内比较明显可见的资源。但也有一些不那么明显的资源。比如每个线程有自己在block内的索引地址寄存器
SR_TID.X,SR_TID.Y,SR_TID.Z(对应threadIdx的x、y、z分量)。如果需要获得这些值,则可以用S2R R0, SR_TID.X这种指令。另外每个线程有几个做dependency check的barrier(有兴趣的可以参考Scott Gray的关于Control Codes的相关介绍)。对于最新的Volta和Turing架构,每个线程还有自己独立的PC,等等。每个线程一般都有很多配套的硬件寄存器(是真的register,不是GPR),比如为了支持debug有debug的寄存器,profiling常用到的performance counter等,其他还有用于实现跳转和返回的PC堆栈等等。这些资源对大多数终端用户虽然不可见,但却会限制每个SM上能同时驻留的线程数(参考CUDA Programming Guide: Features and Technical Specifications的Table 15)。
2. Warp
Warp本来是个纺织学上的术语,叫做经线或经纱。Thread本意是线,翻译成线程。Warp就是一排很长的thread,一般翻译成线程束。Warp固定好后,梭子带着纬线(weft)在warp里来回穿梭,就织成了布。NV起名字也是蛮有意思的。
Warp是CUDA里指令同步运行的最小单元,包含32个线程(理论上说,这个数虽然一直没变,但未来也许可能改变,安全起见可以用内置变量warpSize来代替)。同一个warp的线程同时只能发射同样的指令。假如这个32个线程走了不同的分支(比如一部分进if,一部分走else),则有一部分的线程只能处于等待的状态。这就是所谓的Warp divergence。加Predicate与分支类似,都是有些指令没有真正起作用,但是少了跳转的开销。另外,如果block的总线程数不是warp的整数倍,那就存在不满的warp,相当于有些线程一直是空转的。
注意:这里warp的同步性针对的是warp内的32个线程,而不是指令。根据微架构的不同,同一个warp可能同一周期发射多个指令(比如ALU和Load/Store指令,只要是dispatch port不同就行),也可以不同warp的两条指令同时发射。这个与CPU常见的dual issue或是multi issue的方式是比较类似的。但不管是什么样的多发射形式,warp内的32个线程都是以同样的方式执行多发射。具体多发射的形式取决于SM里warp scheduler的工作方式,可以参考各个架构的Tuning guide介绍SM的部分(比如Maxwell,Pascal,Turing)。
很多内存指令的访问模式都是以warp为单位(注意:这里的访问模式都是针对warp内的同一个指令而言,warp内的不同指令或不同warp的指令,是独立的,并不存在这个关系)。比如:
LDG.E.64.SYS R6, [R0] ;
LDG.E.64.SYS R8, [R2] ;则只有当前warp运行第一个LDG时,32个线程的R0的分布情况才是要关注的,下一条LDG指令的R2的pattern与之无关,另一个warp运行时的R0的pattern也与当前warp无关。
下面列举几个典型场景:
- Global Memory:同一个warp内如果访问的全局内存在128B(32*4B)的对齐范围内,则只需要一次transaction。如果是散列或是不对齐的,则需要多个transaction。具体的模式与微架构有关,甚至早期的架构里每个warp里线程的访问顺序都有要求。
- Shared Memory:Shared memory是分bank的(当前都是32个bank),每个bank一次只能输出一个值。warp如果要访问同一个bank的不同地址(同一地址会做broadcast),则会导致bank conflict。Shared memory的bank conflict的第一个影响是增加了访问延迟,增加量与每个bank的不同地址数有关,但是这个延迟是可能被其他指令隐藏的,不一定关系很大。第二个,也是很多时候更重要的影响,是减小了访问带宽的使用效率。举个例子,没有bank conflict的情况下,shared memory每次传输可以最多输出4B*32bank=128B。有了bank conflict后这可能需要多次传输,相当于传了几次才传完128B的数据,也就是带宽使用率下降了。这个问题在Shared memory的访问带宽是瓶颈时会显得比较突出。
- Constant Memory:CUDA里的constant memory可以用内存指令载入,也可以直接作为指令的操作数。虽然每个SM有相应的Constant cache,它的访问模式却是最单一的:所有warp的线程同一周期只能访问同一个地址,如果访问了不同的地址,那会被serialize成多个操作,直接影响就是指令延迟增大。
- Atomic Operation:当前Turing架构global memory和shared memory都支持原生的atomic操作。如果atomic操作的对象是同一个地址,那也会被serialize。所以它也有类似conflict的情况,正确性不受影响,但效率降低是无法避免的。
需要指出的是,在大部分情况下,这些场景都只是导致指令延迟增加和访问的带宽利用率下降,一般不会影响到后续非依赖指令的继续发射。所以如果瓶颈不在这些带宽上,而延迟又能被有效隐藏的话,对程序性能的影响未必很大。
从Turing架构开始,NV引入了一套uniform data path的功能,用于处理一些整个warp内的公共路径(AMD的GCN架构就有scalar单元,功能基本类似)。比如warp内有个变量a=Array[blockIdx.x], 这个a就是个warp内的公共标量(相当于32个线程用的是同一个值),可以用公共路径来处理。相应的,有独立的uniform的ALU单元,也有一套uniform的Register和Predicate配合。不过,这个功能暂时无法在CUDA C直接使用,主要还是靠编译器判断某个指令是否对于整个warp是公共的。有兴趣的读者可以研究一下Turing White Paper和Turing ISA中Uniform Datapath Instructions中的内容。
Warp内的各个线程交换数据可以用warp shuffle,是直接基于寄存器的数据交换,并不需要额外的存储空间。模式可以一个lane广播到所有的lane,也可以有比较复杂的交换pattern。warp shuffle与基于shared memory的数据交换各有优劣,将来聊CUDA指令集的时候也许会仔细讲讲。
3. Block
Block由用户指定的若干个warp组成,当前最大是1024个线程,相当于32个warp。除了上面说的thread和warp所拥有的资源以外,block还有一些block层的资源:
- Shared Memory:一般译作共享内存,是block层最显著的资源。它的容量可以由编译器决定也可以运行时动态指定,但是一般有个上限(参考CUDA Programming Guide: Features and Technical Specifications的Table 15)。Shared Memory对于整个block内的每个thread都是可读可写的,block外则无法访问。同时比较新的架构里Shared Memory还支持atomic操作,比用global memory做atomic操作延迟还是有很大的提升。
- Synchronize Barrier:block有一个重要操作就是同步,比如
__syncthreads(),有兴趣的可以参考Synchronization Functions,或者是PTX中bar和barrier指令的介绍。注意同步不仅仅是保证warp都运行到某个指令的位置,还要求之前的一些操作如memory load的dependency要先完成。每个block有16个barrier,每个可以支持独立的同步操作(规定到达线程数,是arrive还是sync模式等等,具体参考上面链接的PTX的bar指令。自从CUDA引入Cooperative Groups后,同步的方式更丰富了,也提供了一些上层接口。 - 其他资源:比如一些特殊寄存器(
blockIdx.x/y/z)等。还有一些内部状态变量,比如GPR在整个register file里的起始地址,local memory的起始地址,一些debug用的资源等等。这些对用户不完全开放,所以一般不用太过关注。
Block是kernel运行时进行资源分配的最小完整单元:block的所有资源限制在同一个SM内,启动前必须全部分配到位。如果部分warp提前退出,它的资源应该可以先被释放,但shared memory只能在当前block的所有线程完成后才释放。也就是说,block运行时的所有资源(包括每个thread的私有资源,warp私有资源,block一级的shared memory等等),都必须在block启动前就绪。如果一个SM无法提供足够的资源,则该block无法在这个SM上启动。这种情况可能是SM总资源不够,也可能是有其他block在运行导致占用了一部分。如果一个SM的所有资源都无法满足单个block的某个需求(比如单纯GPR超了),那这个kernel将无法运行。
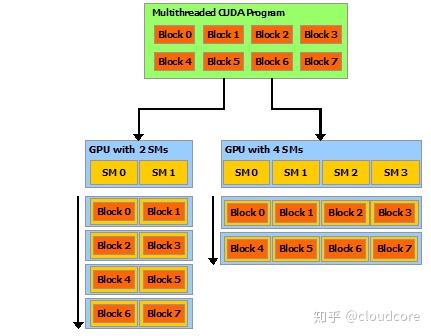
Block由于这个资源使用上的特性,成为CUDA程序实现scalablity的基础。block之间基本相互独立,没有数据交换,理论上能以任意顺序发送到任何有空闲的SM上。两个相邻的block可能在生命周期上没有交集,各个block的运行时间上也可以各有长短,后发先至也很正常。这个灵活度对CUDA程序的适应性非常重要:它既能适配不同SM数目的GPU,也能在与其他kernel同时运行分享资源时保持正确性。也正是由于这个特性,block的资源需求成为occupancy的关键因素。一个SM只能容纳整数个block,一个block只能容纳整数个warp,而warp是最小的并行运行单元,每个SM需要同时运行足够多的warp才能有效隐藏指令的延迟。因此,调整block的资源占用(每个线程的GPR数目,warp数,shared memory大小等),就可以影响同一个SM上能容纳的block数目,从而调整occupancy。
【注】:如果CUDA支持block部分warp先退出则资源先回收,那一个SM可能容纳分数个block。相当于后进的完整block能与之前block残留的warp同时运行。举个例子,假如一个SM最多放32个warp,一个block有24个warp。这样,一个SM放不下两个完整的block。但是如果一个block有16个warp先退出了,资源也回收了。那就留下32-(24-16)=24个warp的可用资源,正好可以放进一个新的完整的block。 这样上一个block残留的8个warp和新block的24个warp就可以同时共存。有shared memory的情况与此类似,关键是warp的GPR资源。这个模式我还没有确认过,待测试。
每个grid的所有Block都具有相同的维度。尽管blockDim是三维向量,实际上仍然按x、y、z的顺序摊平成一维,然后组成一组组的warp。blockDim分三个维度的好处是可以减少一些计算索引时的除法或取余运算,毕竟整数除法和取余的开销比较大。
4. Grid
每个Kernel都有且仅有一个grid。gridDim/blockIdx也有三个维度,与blockDim的三个维度其实也没有什么对应关系。因为block并没有什么空间相邻关系,所以grid的维度其实都没有摊平成一维的意义(当然,和发射的次序也许是有关系的,但其实block的执行也不依赖这个次序)。分成三个维度的好处与blockDim一样,也是减少不必要的除法或取余运算。有的时候为了方便对任务进行多维分割,blockIdx与threadIdx的三个维度会联合起来,共同表示任务的三个维度。比如这种:
int tix = threadIdx.x + blockIdx.x*blockDim.x;
int tiy = threadIdx.y + blockIdx.y*blockDim.y;
int tiz = threadIdx.z + blockIdx.z*blockDim.z;
A[tix + tiy*Nx + tiz*Nx*Ny] = ...这个只是处理上的关联,与线程本身的空间结构并不对应。因为block的所有线程是一维的。grid的所有block是散列的,没有空间相邻性。
前面也讲到了,用户可见的grid资源,比如global memory,constant memory,texture/surface reference或object等等,都是可以在同一个context下的所有kernel间继承和共享的。每个Kernel在grid这一层其实并没有太多的私有资源。大多数用于维护grid本身运行的资源对于用户都是不可见的。比如函数的输入参数需要存到constant memory里,printf输出等这种需要额外分配内存资源用来保存临时结果。再比如说我们前面说过的debug信息和profile用的performance counter其实是最后要汇总的,也需要相应的内存资源。然后硬件上肯定有一些状态量要用来记录kernel当前的状态,比如block发送到多少了,kernel指令放在内存的什么地方,运行kernel所需的资源配置等等。这部分一般是硬件和驱动完成的,用户不可见。但这些东西与用户并非毫无关系,比如会限制每个设备可同时运行的kernel数等等。
Kernel等级结构的功能和意义
从Thread到Grid,构成了CUDA kernel的整体结构。每一层都有它特定的功能和意义:
1. thread是任务的基本单元,每个线程完成一个任务,类似于CPU线程的特化版。
2. warp是实现高效SIMT的基础。通过把warp中的thread同步运行,分摊指令fetch、decode等各种开销,降低运行调度的复杂度,从而避免功耗爆炸。由于线程还是具有比较强的独立性,warp的运行灵活度比CPU常见的SIMD指令(比如SSE,AVX)要更高,调度上更方便。
3. block是能完整独立运行的最小单元,它保证了warp和thread在运行前能分配到所有需要的资源。只有保证这些资源尽可能的随时可用,warp间的运行切换才能高效快速,从而摆脱类似CPU线程切换那些overhead(保存、恢复寄存器和栈操作等等)。而快速切换的能力使得GPU可以通过这种方式更高效的隐藏指令的延迟,省去了许多为了减少延迟而做的大量准备工作(比如分支预测),从而获得更好的性能功耗比。而block的shared memory和synchronize提供了warp间数据交换和同步的功能,提高了局部性能和灵活性。block内的完备性和block间的无关性使得block间的调度具有极大的灵活性,提高了scalablity和程序的适应性。
4. grid或者说是一个kernel,就相当于一个CPU的函数,接收输入,处理后输出结果。其他CUDA api会帮kernel完成相应的资源申请和各种准备工作,而kernel的任务就是计算。但是,block的无序性,或者说是block的高自由度,也限制了kernel的功能。单个的kernel一般不能完成需要block间数据交换、同步或者是带锁的操作,一般说来也不太适合完成需要block级别内存一致性的任务(比如多个block按指定次序读写一段内存)。当然,通过global memory的一些atomic的操作,有些功能是可以实现的,但通常来讲,除了一些简单的reduction操作,实现较为麻烦,性能也往往不佳。
一些特例和变化
需要指出的是,随着CUDA编程模型的不断发展和丰富,特定条件下这些等级结构也会出现一些变化:
1. 自CUDA 5.0开始,CUDA引入了Dynamic Parallelism功能。此前的kernel都只能从host端启动,grid和block的dimension都是在host端就确定好的。这对于形状规则易于均匀划分的计算任务是合适的。但有些应用,一些区域任务多,一些区域任务少,有时候任务大小都需要经过复杂计算,并不能一开始就得到。Dynamic Parallelism允许kernel函数内再启动kernel,由父kernel负责计算子kernel所需的grid、block的dimension,也包括分配子kernel所需要的一些内存资源等等。与此配套还有一些device端的runtime api,主要就是内存申请释放方面的工作。 Dynamic Parallelism相当于在kernel内部(其实是单个thread)又嵌套一层kernel的等级结构。有兴趣的读者可以参考:
- Nvidia developer blog: Adaptive Parallel Computation with CUDA Dynamic Parallelism
- Nvidia developer blog: CUDA Dynamic Parallelism API and Principles
- 官方文档:CUDA C++ Programming Guide: CUDA Dynamic Parallelism
2. 前面我们说过CUDA程序只有block内才能同步,block间是独立运行和调度的,其生命周期也互不关联,所以block间无法同步。另外,除block和warp外的其他颗粒度的同步一般也是不支持的。但CUDA 9.0引入了cooperative group的功能。它支持更多更细致的同步模式,可以block间同步,可以block内的部分线程同步,甚至是warp内的部分线程同步。实际上,为了引入这些feature,它牺牲了一部分自由度。比如为了保证block能够同时运行(生命周期如果没有重叠,显然就无法同步),它需要在启动前确认设备是否可以同时容纳所请求的所有block。更具体的细节,可以参考:
- Nvidia developer blog: Cooperative Groups: Flexible CUDA Thread Programming
- 官方文档:CUDA C++ Programming Guide: Cooperative Groups
CUDA的feature在不断更新变化,也许将来还会有更多的新内容。所以这些东西也不是一成不变的。
聊完了CUDA程序的等级结构,下次就需要讲讲怎么根据这些等级结构去分配每个线程的任务,设定block或者grid的尺寸,多个kernel怎么配合等等。先等我再构思一下吧!下次绝对不能再写这么长了……
有些地方我研究也不深,也许有一些理解不到位或是没跟上时代的地方,还请各位多多指正~