网站怎么做响应式/seo怎么读
Meta Terminal
这是一个使用 MATLAB AppDesigner 设计的 PC 端调试程序,通过串口 Shell 与嵌入式程序交互。使用前请务必仔细阅读以下说明。
Usage
使用 MATLAB (>= 2018b) 打开整个目录,双击右侧 Meta_Terminal_App.mlapp 文件或在命令窗口输入 Meta_Terminal_App。
注意:不可直接将 Meta_Terminal_App.mlapp 文件拖入命令窗口。
Home Tab
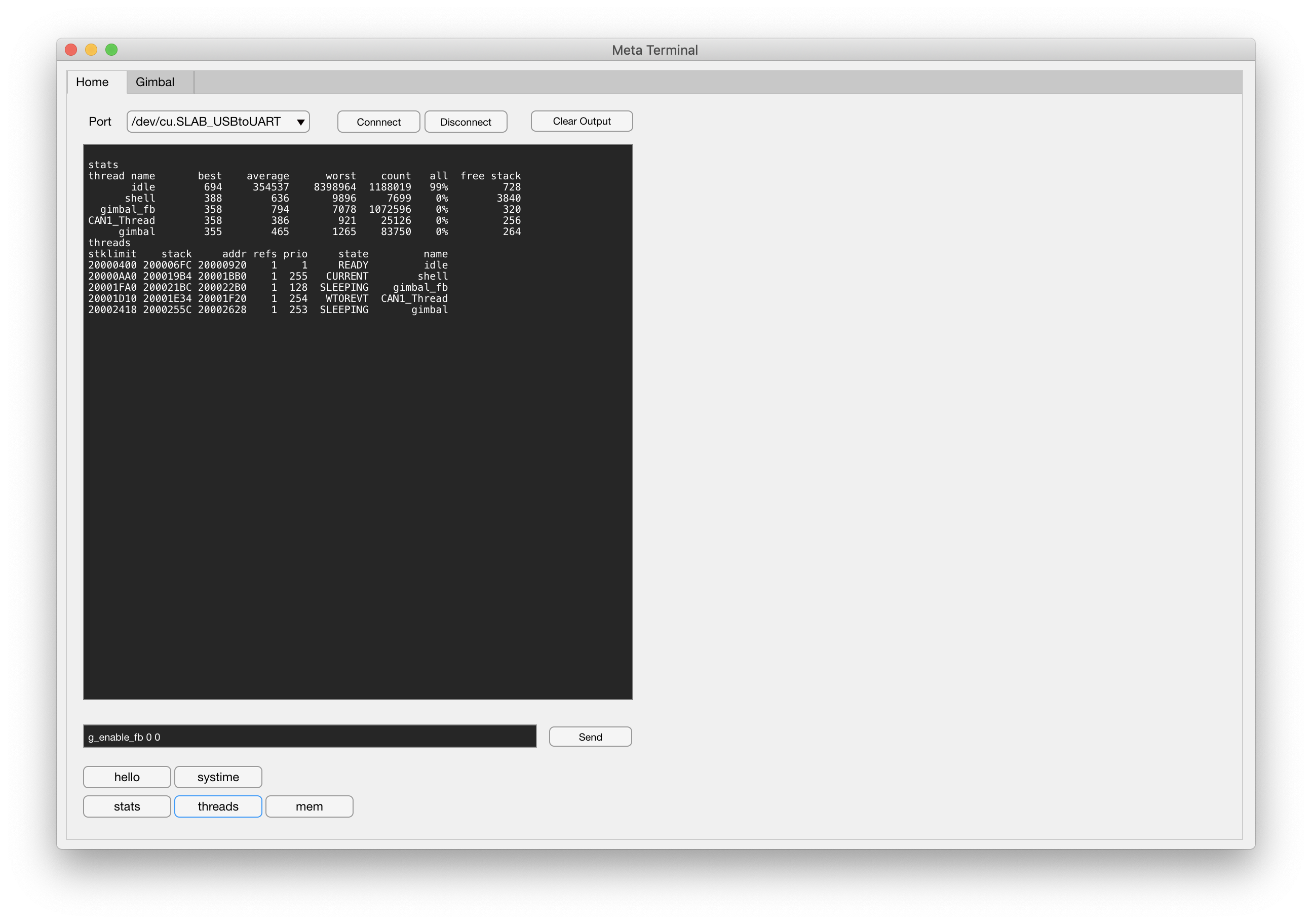
Port 选择串口
/dev/cu.SLAB_USBtoUART 为 Mac 下 CP2102 模块串口
/dev/cu.HC-05-DevB 为 Mac 下 HC05 蓝牙模块串口
COM1 - COM9 为 Win 下串口
Connnect 连接,Disconnect 断开连接,Clear Output 清空终端显示
Send 发送指令
下方按钮为 Shell 指令,参考嵌入式程序 Shell
PS: 回传数据与普通数据共用串口通道,在使用普通串口时,可能会与回传数据混杂。
Gimbal Control 云台控制
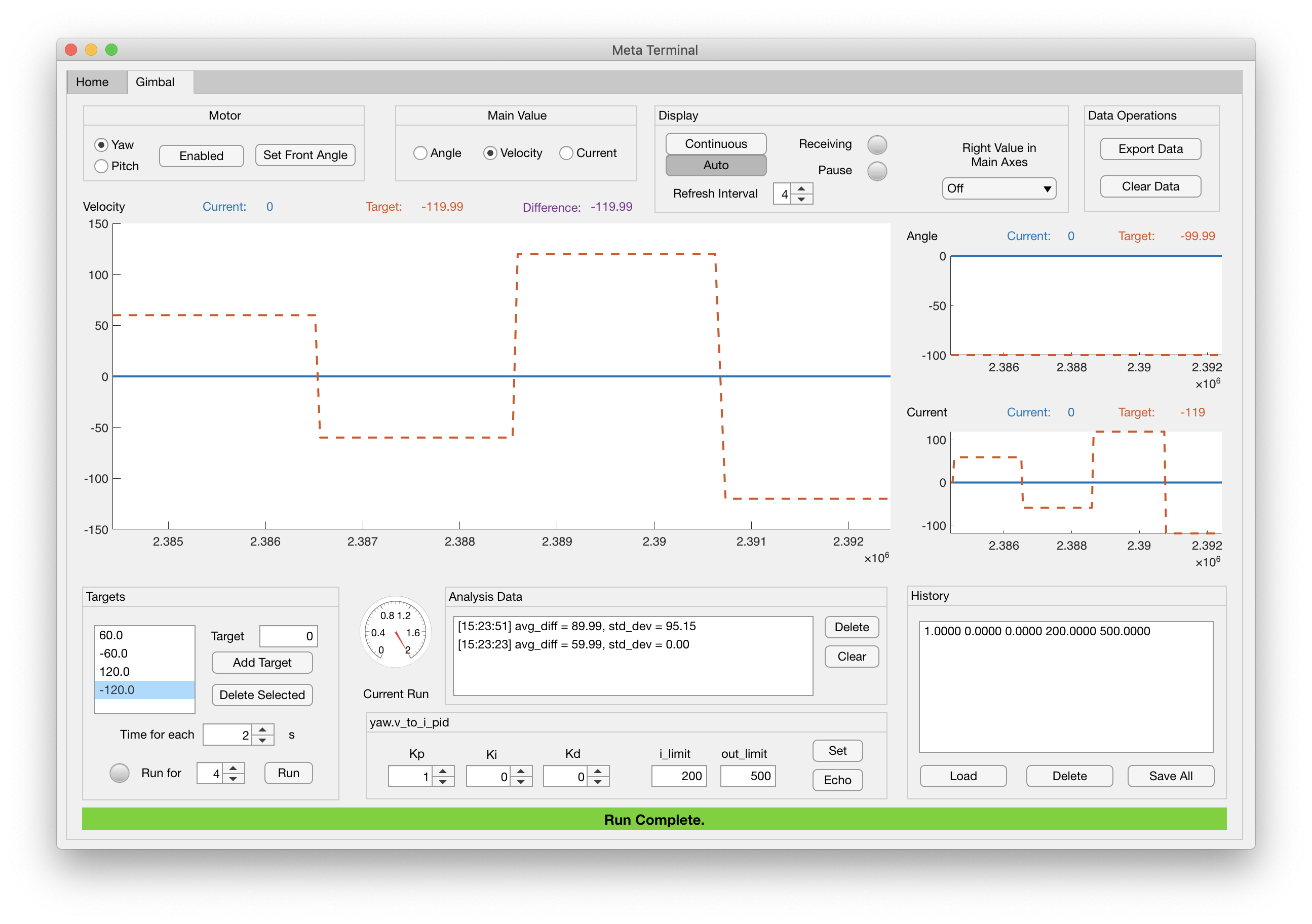
基本思路:每次调节一个电机(Yaw/Pitch),控制一个值(Main Value,角度/角速度/电流)。
控制角度时,对应调节的 PID 为 angle_to_v_pid(v_to_i_pid 同时生效),对应 GimbalController Unit Test 程序
控制角速度时,对应调节的 PID 为 v_to_i_pid(angle_to_v_pid 不生效),对应 GimbalController Unit Test 程序
控制电流时,无 PID 调节,对应 GimbalInterface Unit Test 程序
Set Front Angle 是电机基准角度校准,在电机 Disabled 的情况下摆正云台,点击 Set Front Angle,会以当前实际角度作为基准角度。
关于目标值 (Targets) 的基本思路:每一次运行(Run)中包含一定数量的(Run for X)目标值(Target),每个目标值只持续给定的时间(Time for each)。时间结束后切换到下一个目标(如果到了列表结尾,从头开始),当最后一个目标结束后,电机设为 Disabled。
GimbalController Unit Test 程序内嵌保护,Running 过程中,如果达到了最大实际角度、实际转速、目标电流,则触发保护机制,电机 Disabled,本次运行中断。
显示模式:
Continuous 连续模式,显示最近 X 秒。
Auto 自动模式,当没有 Target 在运行时,图表不更新(但 Current 和 Target 标签依然更新,Receiving 灯闪烁),当开始一次 Run 的时候,图表以 Run 的时刻为起点,以最后一个 Target 结束为终点。
Refresh Interval 刷新间隔,每收到 X 个回传数据,刷新一次图表和统计值。该值由 PC 性能决定,刷新间隔过小可能并不能提高显示的流畅度。
Main Axes Right Value 主图表窗右 Y 轴显示,可从 实际/目标 角度/角速度/电流 六个值中选取。注意:Auto 模式下绘图暂停(Pause)时修改该参数无效,重新开始运行后才生效。
Analysis Data,当前窗口中显示的所有数据的统计,最上面一条为当前/最后一次运行的统计值
avg_diff,平均误差的绝对值
std_dev 是标准差
目标值列表、PID 参数、History 列表和各个电机、各个 Main Value 相关联,并保存在程序中,直到退出程序前都有效。在切换电机或 Main Value 时,以上内容也会对应变化,但不会丢失。但退出程序前请保存!
值得一提的是,开发板中已经设置的 PID 参数和程序中保存的参数可能不同,可使用 Echo 指令让开发板程序回传当前参数。
如果遇到程序卡死,尝试以下操作:
回到 Home 标签页,Disconnect,Connect
使用 Clear Data 清空历史数据
重启串口和开发版
Chassis Control 底盘控制
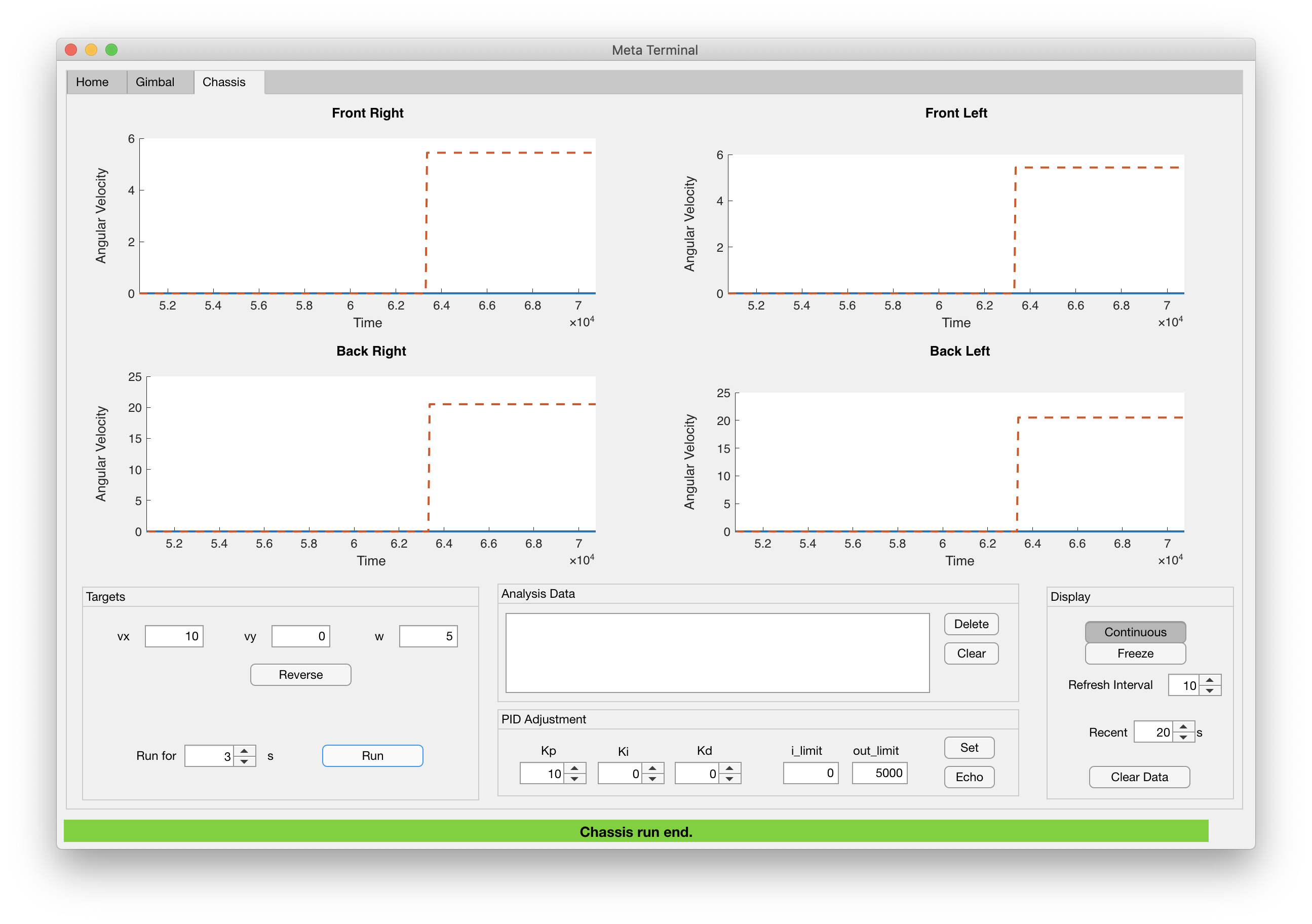
四个图表分别显示四个底盘电机的目标速度和实际速度。
每次只能运行单个目标,运行时间由 Terminal 给定,但计时由嵌入式程序控制(防止通信失效车辆失控)。
点击 Reverse 将目标转换为相反数。
AHRS 可视化
根据回传数据绘制 AHRS 姿态
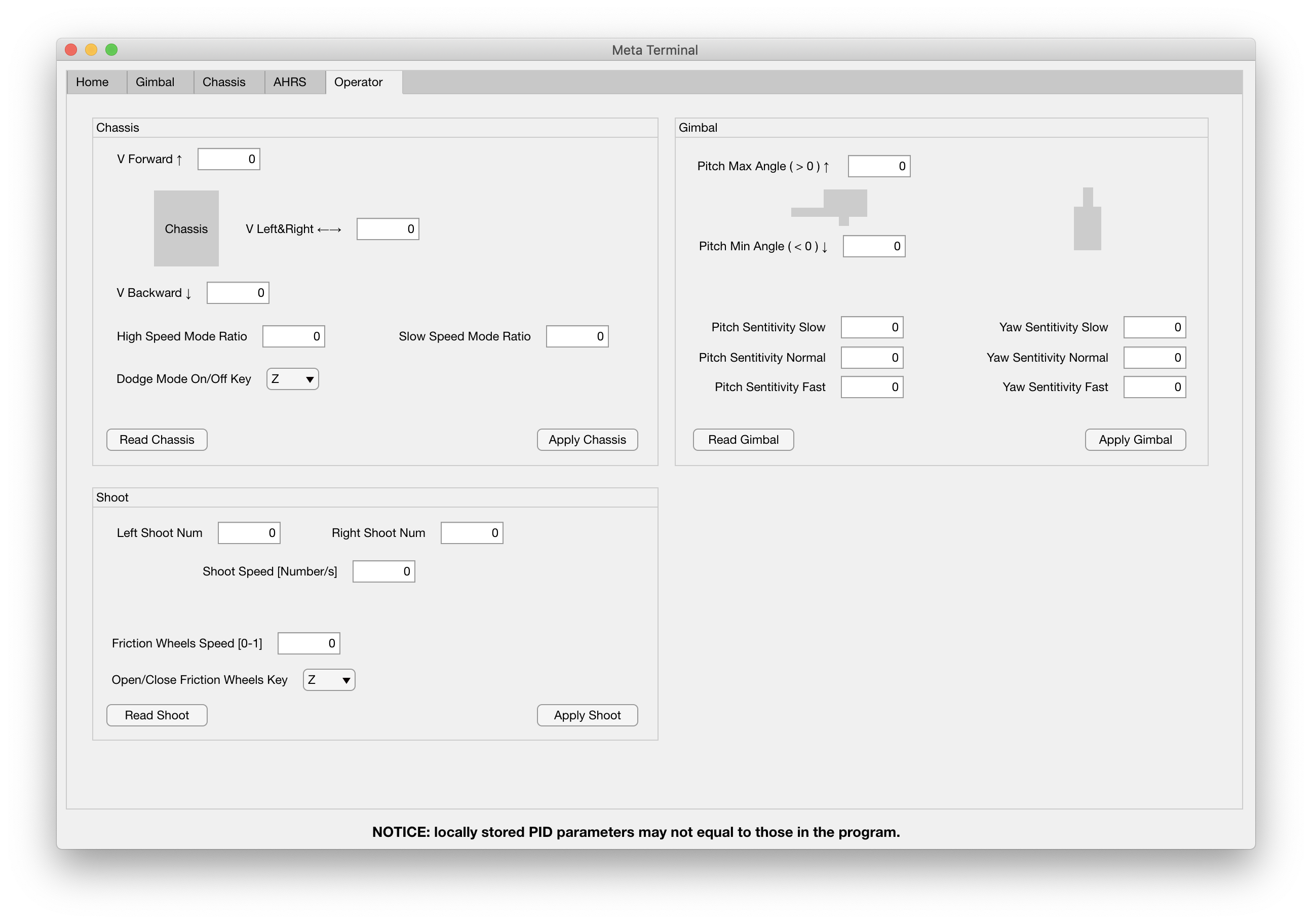
操作手配置
开发指南
本程序使用 MATLAB App Designer 开发。请务必仔细阅读代码开头全局变量处关于各个概念的说明。
Update History
2019.1.4 V1.0
初次版本。
2019.1.10 V2.0
大幅重构云台调参功能
2019.1.13 V2.1
增加了数据分析。
增加了主图表窗右 Y 轴显示。
优化性能,相应的在 GimbalController Unit Test 中将反馈间隔缩小至 150ms,只回传当前电机信息。
在 GimbalController Unit Test 中拓展了角度、速度、电流的限制范围。
更改了图表配色,使用虚线显示目标值。
其他小的优化与 Bug 修复。
2019.1.16 V2.2
优化核心代码,大幅提升数据处理速度,现已支持 50 ms 回传(提升了66.7%!)
增加数据纠错,提升稳定性
增加刷新率设置
其他小的优化与 Bug 修复。
2019.1.17 V2.2.1
更改反馈速度至 25 ms
小幅减小回传数据与普通信息混杂的可能性。
2019.1.18 V2.2.2
添加摩擦轮开关 "FW Enable"
2019.2.12 V3
添加底盘控制
2019.6.27 V3.1
添加 AHRS 可视化
2019.7.12 V3.2
添加操作手配置