北京做公司网站的公司/站长工具服务器查询
智能控制作业二“模糊控制位置跟踪的SIMULINK 仿真
一、题目 设被控对象的传递函数为s
s s G 252500)(2+=,输入信号为方波,周期为1秒,幅值为1,(可以用Pulse Generator 模块来产生)。
1)试设计两输入单输出模糊控制器,输入为偏差E 和偏差变化率EC ,输出为控制量U ,使系统输出能实时跟踪输入信号。
2)通过仿真理解并分析E 和EC 的参数选择对系统稳态误差和动态性能的影响,这些参数包括模糊子集的个数,论域的范围等。作业中最好把不同参数下的仿真结果附上。
二、MATLAB 解决方案
1、模糊控制模块的创建
在MA TLAB 命令窗口中输入fuzzy 命令,会弹出模糊控制GUI 界面,打开隶属度函数编辑窗口,输入变量为E 和EC ,输出变量为U ,输入输出论域均设置为[-3 3],每个变量都设置NB ,NM ,NS ,ZO ,PS ,PM ,PB 七个模糊子集,每个变量的隶属度函数均如图1所示,为了使输入误差在零附近反应敏感,这一部分隶属度函数设置得比较尖。
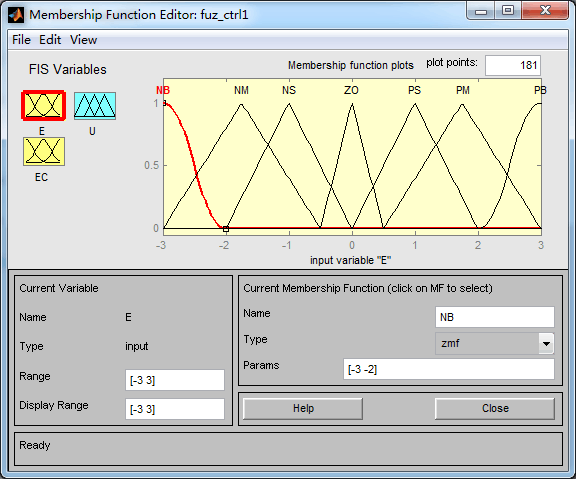
图1 隶属度函数编辑窗口
根据如表1输入控制规则,如图2所示: